
Tom Kelly, John Femiani, and Peter Wonka
Computer Vision and Pattern Recognition, 2024
We present WinSyn, a unique dataset and testbed for creating high-quality synthetic data with procedural modeling techniques. The dataset contains high-resolution photographs of windows, selected from locations around the world, with 89,318 individual window crops showcasing diverse geometric and material characteristics. We evaluate a procedural model by training semantic segmentation networks on both synthetic and real images and then comparing their performances on a shared test set of real images. Specifically, we measure the difference in mean Intersection over Union (mIoU) and determine the effective number of real images to match synthetic data’s training performance. We design a baseline procedural model as a benchmark and provide 21,290 synthetically generated images. By tuning the procedural model, key factors are identified which significantly influence the model’s fidelity in replicating real-world scenarios. Importantly, we highlight the challenge of procedural modeling using current techniques, especially in their ability to replicate the spatial semantics of real-world scenarios. This insight is critical because of the potential of procedural models to bridge to hidden scene aspects such as depth, reflectivity, material properties, and lighting conditions.
click on images on the left for more information
Random samples from the synthetic and real datasets. Click and hold (or hover over right pane) to see labels.
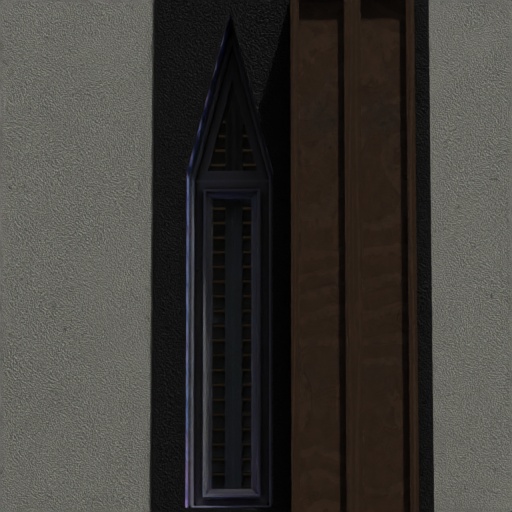
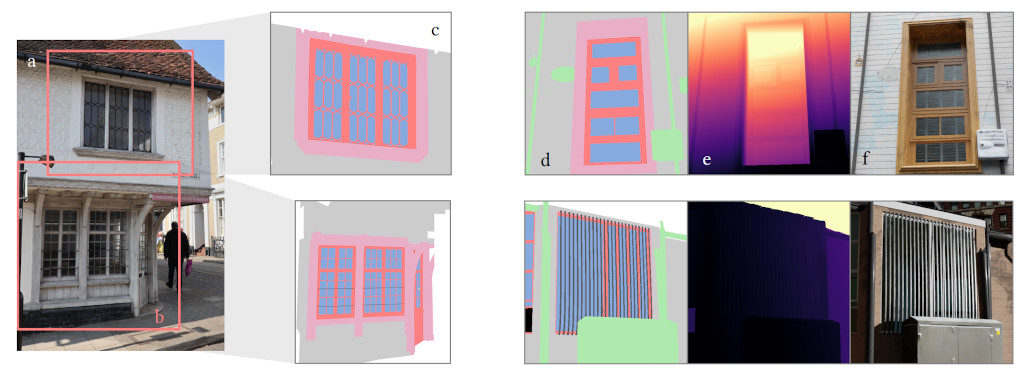 Photographers in 28 geographic regions captured real-world photos (a) of windows that are cropped (b) to single windows, which are then labeled (c). Synthetic windows are rendered giving color (f) and labels(d), while other variations such as depth (e) are possible.
Photographers in 28 geographic regions captured real-world photos (a) of windows that are cropped (b) to single windows, which are then labeled (c). Synthetic windows are rendered giving color (f) and labels(d), while other variations such as depth (e) are possible.
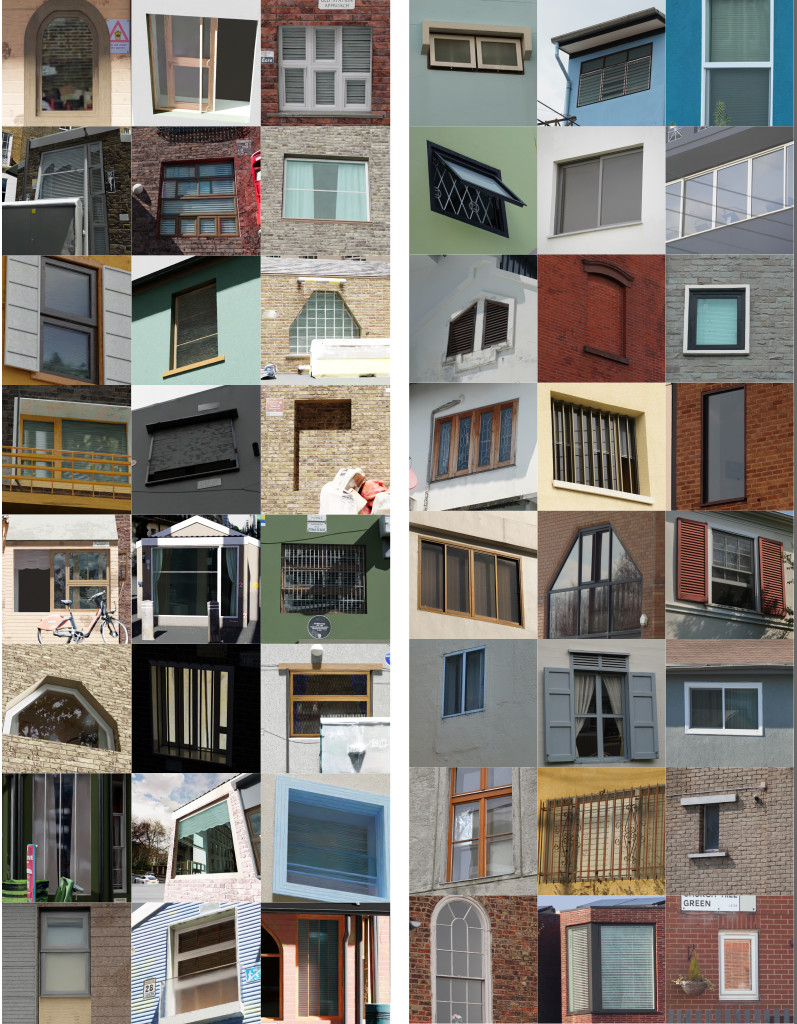 Selected real and synthetic/procedural examples from the testbed.
Selected real and synthetic/procedural examples from the testbed.
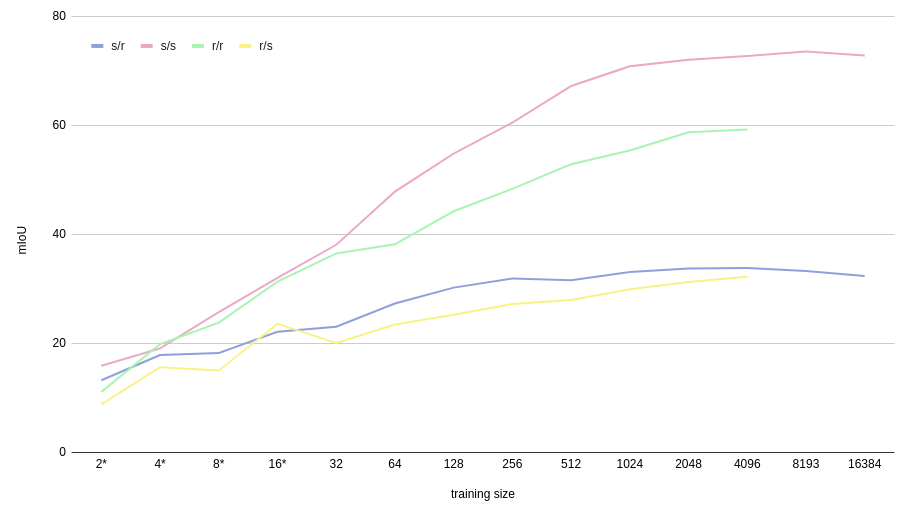 WinSyn has an appropriate level of complexity to study the synthetic data problem in the lab. Here we see the segmentation task axis (mIoU) for different and sizes of training data. s/r trains on synthetic with varying numbers samples, and evaluates on 4.9k real.
WinSyn has an appropriate level of complexity to study the synthetic data problem in the lab. Here we see the segmentation task axis (mIoU) for different and sizes of training data. s/r trains on synthetic with varying numbers samples, and evaluates on 4.9k real.
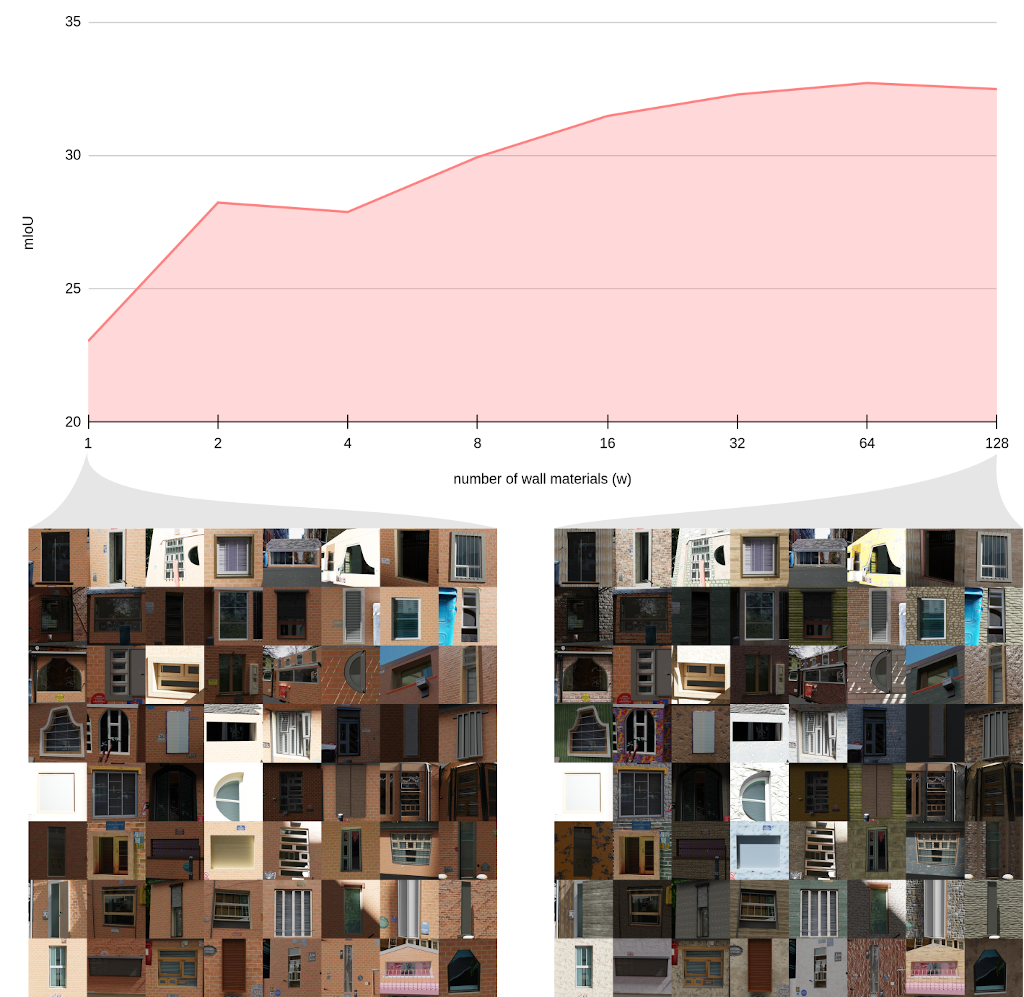 We are also able to consider a large number of synthetic model variations. Top: a sequence of variations with the impact of the number materials (w) used for the wall geometry on segmentation task performance (mIoU). Bottom: variation dataset examples for w=1 (left) and w=128 (right).
We are also able to consider a large number of synthetic model variations. Top: a sequence of variations with the impact of the number materials (w) used for the wall geometry on segmentation task performance (mIoU). Bottom: variation dataset examples for w=1 (left) and w=128 (right).
We would like to thank our lead photographers Michaela Nömayr and Florian Rist, and engineer Prem Chedella, as well as our contributing photographers: Aleksandr Aleshkin, Angela Markoska, Artur Oliveira, Brian Benton, Chris West, Christopher Byrne, Elsayed Saafan, Florian Rist, George Iliin, Ignacio De Barrio, Jan Cuales, Kaitlyn Jackson, Kalina Mondzholovska, Kubra Ayse Guzel, Lukas Bornheim, Maria Jose Balestena, Michaela Nömayr, Mihai-Alexandru Filoneanu, Mokhtari Sid Ahmed Salim, Mussa Ubapa, Nestor Angulo Caballero, Nicklaus Suarez, Peter Fountain, Prem Chedella, Samantha Martucci, Sarabjot Singh, Scarlette Li, Serhii Malov, Simon R. A. Kelly, Stephanie Foden, Surafel Sunara, Tadiyos Shala, Susana Gomez, Vasileios Notis, Yuan Yuan, and LYD for the labeling. Last, but not least, we also thank the blender procedural artists Gabriel de Laubier for the UCP Wood material and Simon Thommes for the fantastic Br'cks material. Both were modified and used in our procedural model.